
Ce cours comporte un seul
grand TD/TE sur 8 heures. Le but est, à la fin de ce cours, d'être
capable de maitriser la boucle capteur actionneur pour un système
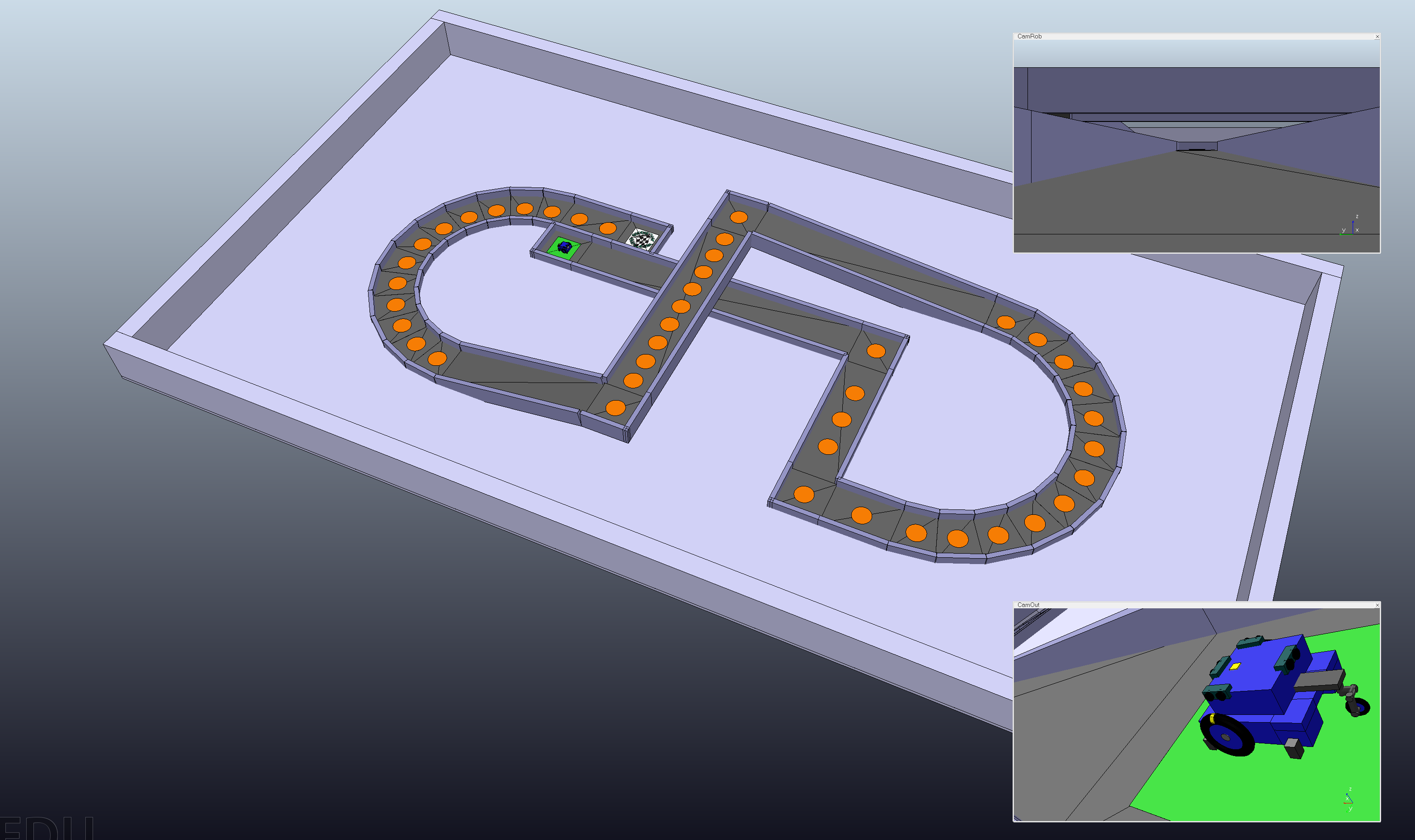
simple. Il s'agit de faire parcourir un circuit à un robot à commande
différentielle en validant un certain nombre de points de passage
(way-points). Quatre types de capteurs pourront être utilisés : des
odomètres, une boussole, des télémètres à ultrasons (sonar) et des capteurs réflectifs de suivi de ligne blanche. Le robot évolue
dans un environnement simulé et la notation est en partie réalisée par
le simulateur lui-même. La boucle capteur actionneur requiert la
maitrise de plusieurs domaines : capteur, traitement du signal et
automatique. L'estimation des biais, le filtrage passe bas linéaire et
non linéaire des données capteurs et la régulation proportionnelle
dérivée seront les principaux points étudiés dans ce cours. Un brin
d'algorithmie sera aussi nécessaire pour définir la mission du robot.
Le travail est individuel et sera à rendre sur MOODLE en respectant les formats et les dates de remise définis dans le sujet de BE.